Qiangqiang HuangI am a software engineer working on Optimus at Tesla. I received my Ph.D. degree in 2023 from MIT. I was a Ph.D. student at the Marine Robotics Group, part of CSAIL, where I worked on inference algorithms for SLAM. I received my B.E. and M.S. degrees from Tsinghua University. My previous research lies at the intersection of robotics, Bayesian inference, computer vision, and machine learning. Specifically, I focused on developing full posterior inference algorithms that enable uncertainty-aware robotic perception. Applications of the algorithms include evaluating the uncertainty in localization and mapping, as well as supporting robots to plan how to reduce uncertainty for safe navigation. |
|
Recent publications |
|
GAPSLAM: Blending Gaussian Approximation and Particle Filters for Real-Time Non-Gaussian SLAMQiangqiang Huang, John J. Leonard IEEE/RSJ IROS, 2023 arxiv / video / code / A real-time SLAM solver that infers marginal posteriors of robot poses and landmark locations. We demonstrate the evolution of posteriors on realworld range-only SLAM and object-based SLAM datasets. |
|
Optimizing Fiducial Marker Placement for Improved Visual LocalizationQiangqiang Huang, Joseph DeGol, Victor Fragoso, Sudipta N. Sinha, John J. Leonard IEEE Robotics and Automation Letters (RA-L) & IEEE/RSJ IROS, 2023 arxiv / video / code / An algorithmic solution to the problem of automatic marker placement within a scene. Specifically, given a predetermined set of markers and a scene model, we compute optimized marker positions within the scene that can improve accuracy in visual localization. |
|
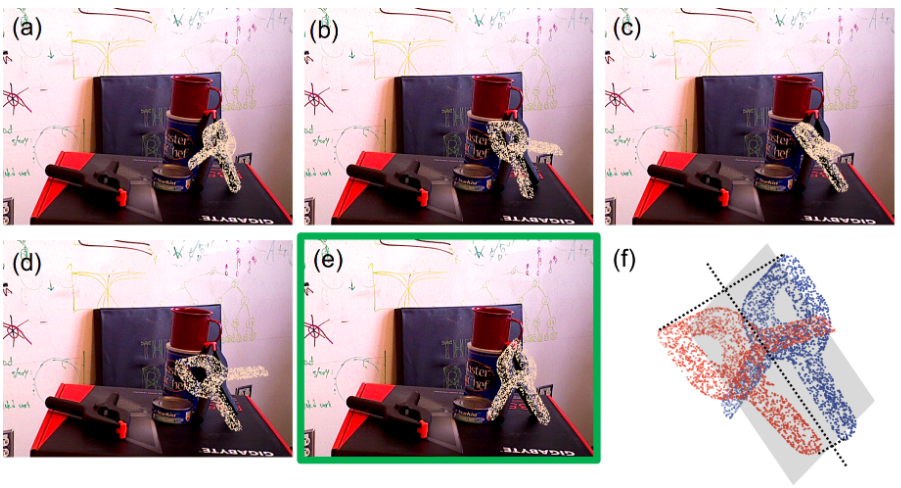
Incremental Non‑Gaussian Inference for SLAM Using Normalizing FlowsQiangqiang Huang, Can Pu, Kasra Khosoussi, David M. Rosen, Dehann Fourie, Jonathan P. How, John J. Leonard IEEE Transactions on Robotics (T-RO), 2022 arxiv / video / code / A solver that blends normalizing flows and the Bayes tree (aka. junction tree) to incrementally infer the joint posterior encountered in SLAM. Experiments were performed on range-only SLAM problems with data association ambiguity. This paper is an extension of our paper published in ICRA 2021. |
|
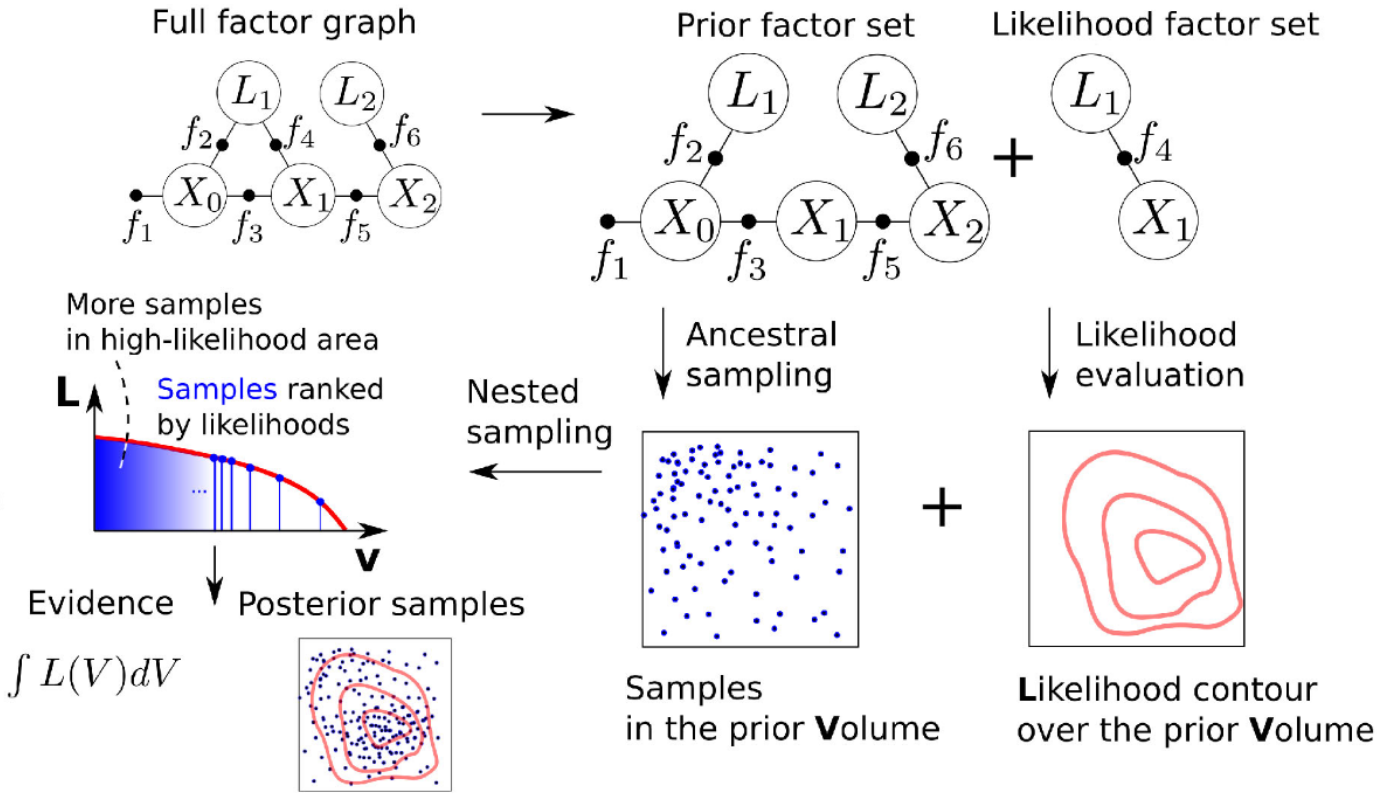
Nested Sampling for Non-Gaussian Inference in SLAM Factor GraphsQiangqiang Huang, Alan Papalia, John J. Leonard IEEE Robotics and Automation Letters (RA-L) & IEEE/RSJ IROS, 2022 arxiv / video / talk / code / A Monte Carlo approach that leverages nested sampling to generate high‑quality samples of posterior distributions at the expense of computation. These samples serve as reference solutions for validating other inference methods. |
|
A Multi‑Hypothesis Approach to Pose Ambiguity in Object‑Based SLAMJiahui Fu, Qiangqiang Huang, Kevin Doherty, Yue Wang, John J. Leonard IEEE/RSJ IROS, 2021 arxiv / video / talk / This work presents a learned pose estimation network that provides multiple hypotheses about the 6D pose of an object, and formulates these hypotheses via mixture models in a SLAM backend. |
|
Consensus-Informed Optimization Over Mixtures for Ambiguity-Aware Object SLAMZiqi Lu*, Qiangqiang Huang*, Kevin Doherty, John J. Leonard IEEE/RSJ IROS, 2021 arxiv / video / talk / A real-time object-based SLAM system that is robust to symmetry- or occlusion-induced pose ambiguity from individual 6D object pose predictions. |
|
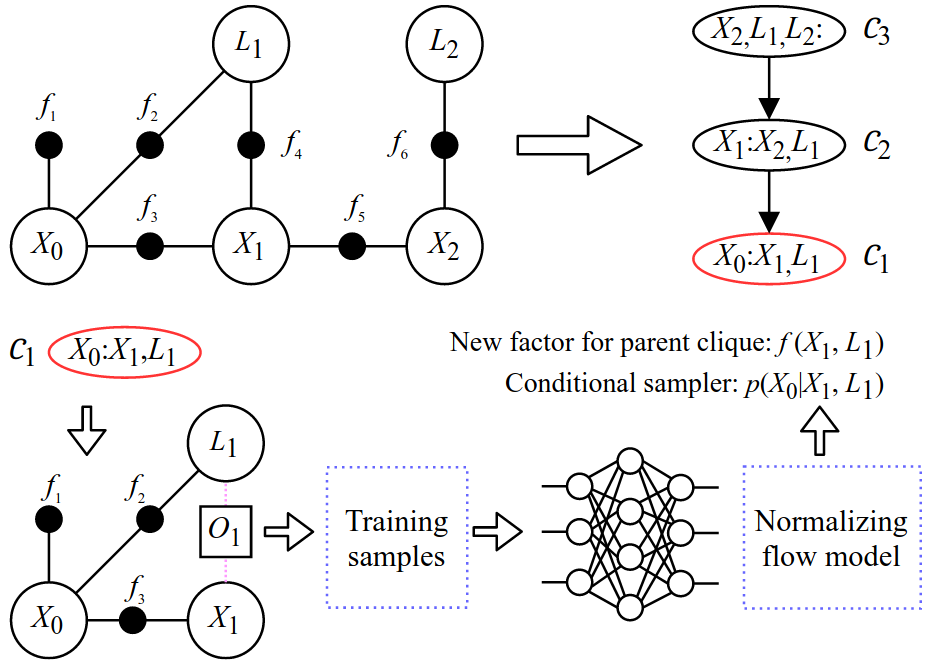
NF‑iSAM: Incremental Smoothing and Mapping via Normalizing FlowsQiangqiang Huang*, Can Pu*, Dehann Fourie, Kasra Khosoussi, Jonathan P. How, John J. Leonard IEEE ICRA, 2021 arxiv / video / talk / code / An algorithm that exploits the expressive power of neural networks, and trains normalizing flows to model and sample the joint posterior encountered in SLAM. |
|
Design and source code from Leonid Keselman's Jekyll fork of Jon Barron's website |